Robot MS: Luchador de Sumo – Guía de usuario
 MS es un robot autónomo de morforlogía móvil, diseñado para competiciones de luchador de sumo en la categoría de Min (10 X 10 cm y un peso de 500 gramos). Se trata de un robot de tipo diferencial, su tracción basa en dos motores de corriente directa, alimentado por una batería de 9 Voltios.
MS es un robot autónomo de morforlogía móvil, diseñado para competiciones de luchador de sumo en la categoría de Min (10 X 10 cm y un peso de 500 gramos). Se trata de un robot de tipo diferencial, su tracción basa en dos motores de corriente directa, alimentado por una batería de 9 Voltios.
MS utiliza un microcontrolador de la marca Atmel modelo Atmega328, con firmware de Arduino, lo cual facilita su programación.
Advertencias de seguridad y precauciones de uso
MS, Mini-sumo, no es un juguete. Puede ser usado por niños y jóvenes bajo la supervisión y ayuda de un adulto. El uso o abuso del producto es responsabilidad del usuario final. El distribuidor no se hace responsable por daños o lesiones que éste pueda causar durante su uso. Este producto no está diseñado para jugar, no debe usarse fuera de la A continuación se indican las precauciones:
- Antes de comenzar por favor lea cuidadosamente el manual.
- Utiliza baterías alcalinas o recargables. En el caso de las alcalinas asegúrate que sean nuevas, y si compras recargables verifica que tengan suficiente carga, de lo contradio al programar lo puedes inutilizar para siempre.
- Condiciones de trabajo:
- superficie lisa, de preferencia melamina,
- interiores con luz controlada.
- No colocar la tarjeta de circuito impreso (PCB) sobre superficies metálicas.
- El robot MS esta ensamblado y soldado con piezas que contienen plomo y estaño, por lo cual es necesario lavarse las manos después de manipularlo.
- Los componentes del robot están expuestos, por lo que es importante no tocarlo con las manos mientras está en funcionamiento. Si nuestras manos están mojadas se puede causar un corto circuito y dañar uno o varios componentes.
Primeros pasos de MS
¿Qué necesitas?
- Batería de 9V. Utilice de preferencia baterías alcalinas o recargables. Si trabajará durante tiempos prolongados con el robot, le recomendamos usar baterías recargables de Niquel-Metal Hidruro, NiMH. No olvide comprar el cargador correspondiente.
- Cable A – B, USB a Micro USB. MS no requiere un programador externo, todo el
- hardware electrónico ya se incluye en el robot, pero para la comunicación entre la computadora y el robot se requiere dicho cable.
- Necesitas una computadora para programar el robot. Para ello se utiliza la interfaz de programación de Arduino, plataforma libre, que funciona en cualquiera de los siguientes sistemas operativos:
- Windows
- Mac
- Linux
- Material para pruebas. Es necesario que tenga a mano papel, cartulinas, cartoncillo y cinta aislante negra o blanca, para improvisar pistas y probar el robot.
Conoce más de MS
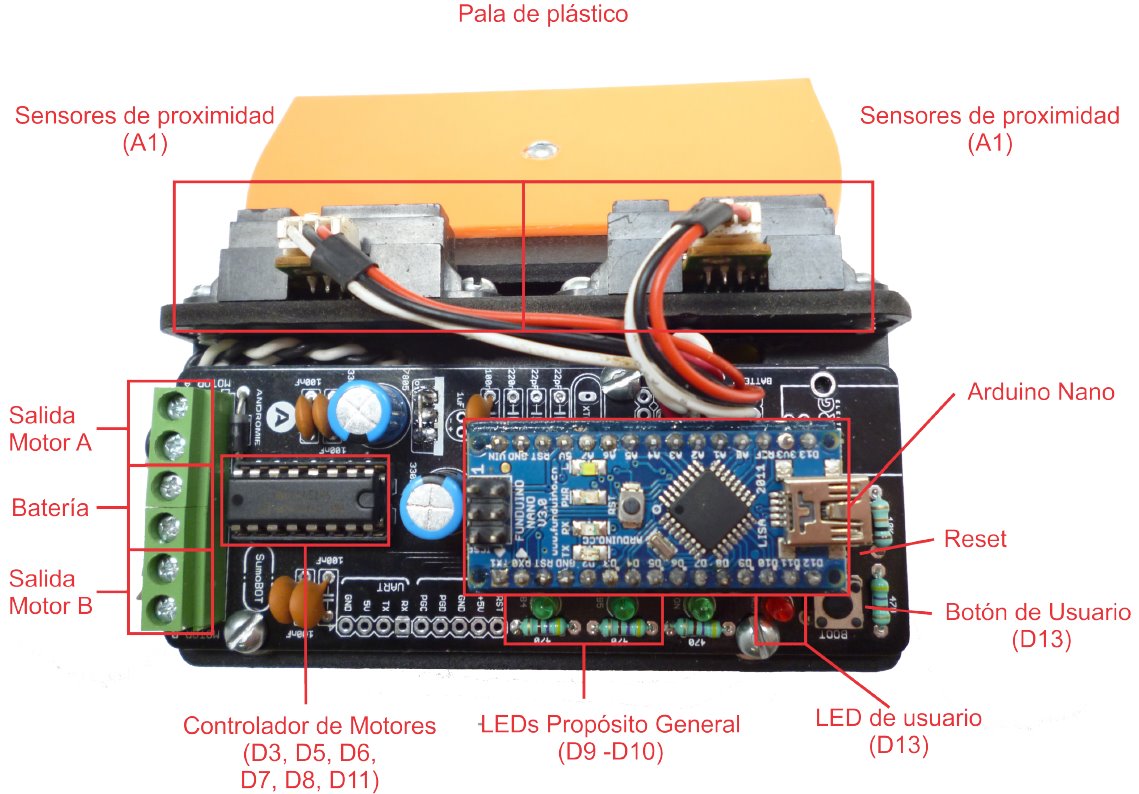
Figura 1. Vista frontal de robot luchador de sumo MS
Ms es un robot de morfología móvil de tipo diferencial, es decir se desplaza por medio de dos ruedas con dos motores, uno para cada una. El cerebro de esta robot es un Arduino Nano, y está encargado de procesar la información que le proveen los sensores para realizar correcciónes a través de los motores, bajo el esquema básico de control.
Hardware de MS
En la figura 1 se muestra el hardware del robot. Observe que se cuenta con varios componentes y dispositivos electrónicos. ¿Reconoce alguno?, a continuación se explican brevemente.
- Sensores reflectivos de contraste, son los encargados de percibir la información del ambiente, en este caso el contraste, la diferencia entre o blanco y lo negro, lo que no brilloso y lo opaco. Este dispositivo se compone de dos partes: emisor y receptor. Tanto el primero como el segundo trabajan en el rango infrarrojo de la luz. Ésta no es perceptible por el ojo humano, pero con ayuda de una cámara digital se observa.
- LEDs. Diodos emisores de luz por sus siglas en inglés, son dispositivos que emiten una luz al circular una corriente por sus terminales. En MS se usan como indicadores y son programables por el usuario por medio del Arduino.
- Driver para motor. Basado en un circuito integrado de Puente H, es el que proveen de potencia a los motores, siendo la interfaz entre el microcontrolador y el motor.
- Son interruptores de encendido al contacto. El robot cuenta con 2, el primero para reiniciar el microcontrolador (arduino), y el segundo como botón de usuario para propósito general.
- Driver para motor, Son motores de corriente directa (CD, como el de las baterías), con una caja de engranes adaptada. Los usados en MS tienen una reducción de 48:1, esto es, por cada 48 vueltas que gire el motor, el eje del reductor girará 1 vuelta. De este modo se incrementa el torque, fuerza, y se reduce la velocidad.
- Batería. Es la que provee de energía eléctrica a todo el robot, arduino, sensores, LEDs, motores, pulsadores. Es tipo rectangular de 9V.
Fuente: Grupo Educare
Deja una respuesta